










![[POLICY WATCH] CHINA’S 2025 CAR SCRAPPAGE SCHEME: HOW NEVS ARE RESHAPING THE MARKET](http://www.zingevs.com/wp-content/uploads/2025/07/388ec94d-e2cc-4894-97e0-48762c7e4d1d-1024x615.jpg)
![[CONSUMER INSIGHTS] WHAT SHOULD CHINA LUX. NEVS LOOK LIKE?](http://www.zingevs.com/wp-content/uploads/2025/07/DM_20250705201845_001-1024x514.jpeg)




BYD’s e4 (Yi SiFang) represents the pinnacle of the company’s NEV powertrain innovation – a four-motor distributed drive system that redefines performance, safety, and adaptability.
Unlike conventional EVs relying on centralized motors, e4 empowers each wheel with an independent 220kW motor, enabling unparalleled torque vectoring and redundancy. This paper dissects e4’s engineering brilliance, strategic implications, and the challenges ahead.
Four Independent Wheel Motors
This hardware architecture enables two disruptive scenarios:
- True Zero-Radius Turning: Unlike systems like XPeng X9’s “garage spin” (which brakes one-side wheels), the e4’s counter-rotating tires carve perfect arcs on asphalt, like a compass drawing a circle.
- Fault Tolerance: If one motor fails, the remaining three redistribute torque within 100 milliseconds—20x faster than traditional 4WD mechanical systems.
Technical details/some are based on own analysis since the yangwangauto.com website didn’t show much precise information
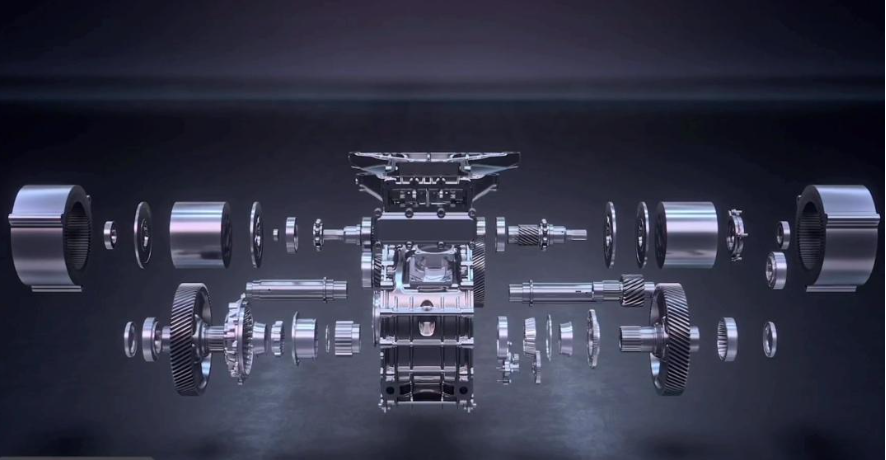
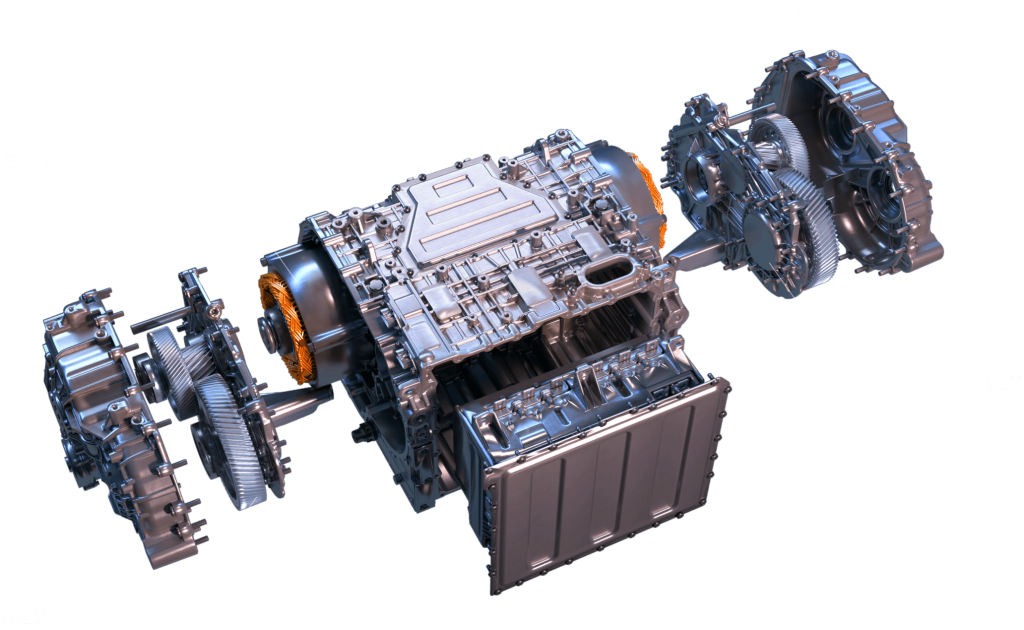
1. Modular “干”-Shaped Integration
- The system employs a compact “干”-shaped architecture:
- Top bar: Dual motor controllers (for left/right wheels)
- Middle bar: Two high-performance motors (parallel layout)
- Vertical bar: Dual gear reducers
- Semi-axles extend laterally from the reducers to the wheels, avoiding interference with suspension or chassis.
- Space Efficiency: The entire assembly fits within a compact footprint, comparable to a conventional front suspension spring, leaving room for hybrid powertrain components.
2. Software-Defined Differential
- The system eliminates mechanical differentials, relying instead on:
- Real-time wheel-speed calculations by a central computing unit
- Instantaneous torque adjustments via individual motor control
- Trade-off: A simple mechanical differential requires no computation, but BYD’s approach enables advanced torque vectoring (e.g., crab-walking, tank-turning).
- Limitation: Complex algorithms require vast real-world validation to prevent latency or errors in dynamic conditions (e.g., split-grip surfaces).
3. Integrated E-Diffs (Locking Mechanism)
- Two electronically simulated “differential locks” are embedded within the drivetrain.
- Likely use multi-plate clutches for limited-slip functionality.
- Not comparable to heavy-duty mechanical lockers (e.g., Jeep’s Rock-Trac).
- Saving Grace: Each motor’s 320–420 Nm torque compensates for weak lockers—if one wheel slips, the opposite motor can overpower most terrain.
4. 800V SiC Power Electronics
- Silicon carbide (SiC) inverters enable:
- High-frequency switching for precise torque modulation.
- 800V fast-charging compatibility (likely shared with BYD’s Blade Battery architecture).
- Challenge: SiC’s thermal management under sustained high loads (e.g., repeated 0–100 km/h launches) remains untested.
5. Efficiency & Performance
- System efficiency: 97.7% (vs. 96% for manual transmissions).
- Combined output: 1,100 hp, enabling sub-3s 0–100 km/h acceleration.
- Motor specs:
- 205,000 rpm max speed → wider torque band.
- Independent control allows scenarios like diagonal wheel reversals (e.g., tank turns).
- Heat Risks: Prolonged high-RPM operation or aggressive torque vectoring could trigger thermal throttling, degrading performance.
6. Reliability & Durability Concerns
Tire Wear: Persistent torque adjustments may accelerate tire degradation if calibration is overly aggressive.
Thermal Stress: Four tightly packed motors generating peak heat simultaneously may demand active liquid cooling- failure risks rise in off-road/low-speed scenarios.
Algorithm Dependency: Real-world edge cases (e.g., mixed traction, emergency maneuvers) demand flawless sensor fusion and control logic.
Redundancy: No mechanical fallback if software fails (e.g., CAN bus errors).
Competitive Edge vs. Rivals
| Aspect | BYD e4 | Tesla Plaid | NIO / Xpeng |
| Drive System | 4x independent motors (880kW) | 3x centralized motors | Dual-motor AWD |
| Battery Tech | Blade (LFP) + 800V | 4680 (NCA, ~400V) | Swappable (NIO) |
| Charging Speed | 10-80% in ~15 min | Slower at 400V | Dependent on swap stations |
| Weakness | Smart driving lags behind | Software superiority | Less motor integration |
Strategic Impact & Challenges
Cost Efficiency: BYD’s vertical integration- from SiC chips to lithium mines- cuts e4’s cost by ~30% vs. rivals
Software Gap: While e4’s hardware excels, BYD’s autonomous driving (Tian Shen Zhi Yan, or DiPilot/ Divine Eye) trails Huawei ADS/Tesla FSD
Market Forecast: e4’s scalability (e.g., Yangwang U8, upcoming luxury models) positions BYD to dominate high-margin EV segments

Conclusion: e4 as a Game Changer

e4 is BYD’s “V12 moment” – a hardware superb leap combining raw power (880kW!), fault tolerance, and charging speed. Yet, the battleground shifts to software-defined vehicles. As we quipped: “e4 proves BYD can build a spaceship. Now, can they code the AI to book an air ticket?”

{kind=link}